|
|
|
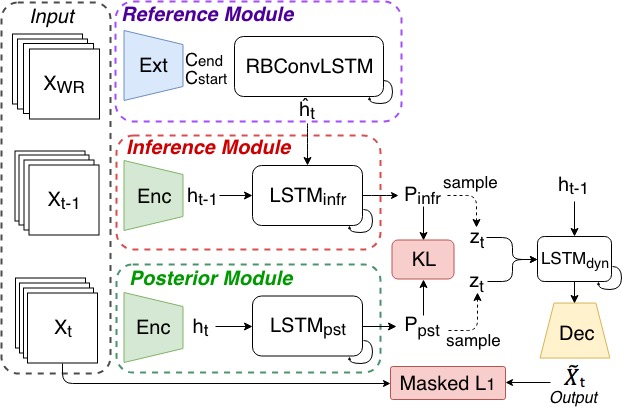
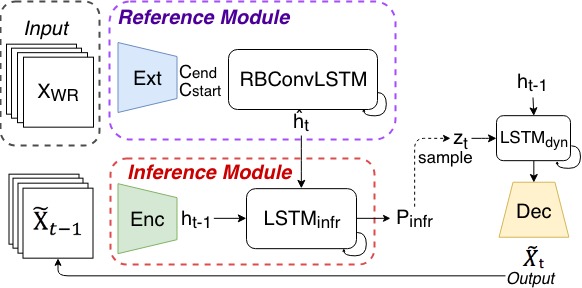
| Training | Inference |
| [GitHub] Code will be released after the paper review process |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our odel random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our odel random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |
Ground truth:    Our model random sample:  Our model best SSIM sample:  |